Next: SweepList.pl Up: Sweep Previous: Sweep Contents Index
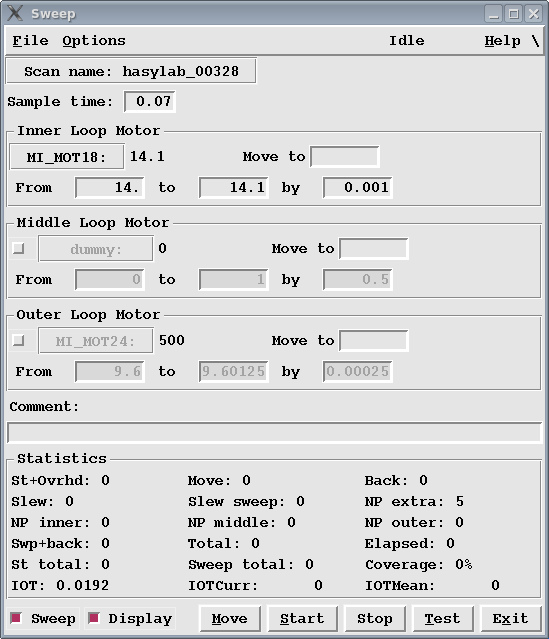
Figure 9.1 shows the Sweep menu.
Here is the explanation of the items:
| Scan name: A button that displays the current scan name.
The generic part can be changed by click this button.
The scan name is actually the name of the directory that
stores the MCA files.
In addition, Files.lis contains the motor positions and the corresponding MCA file names and also the counter values. A temporary version of the file, Files_temp.lis is maintained. It can be used by an analysis program. | ||||||||||||||||||
| Sample time: For non-sweep measurements this is just the gate time for the MCAs and the counters at some fixed position. For sweep-mode operation the sample time is an input for the calculation of the slew rate that is used during the sweeps. Another input is the number of intervals. | ||||||||||||||||||
| Inner loop motor: This frame allows the user to specify the details for the sweeps. A motor can be selected by a click on the button, the limits of the sweeps can be supplied and the size of the interval. | ||||||||||||||||||
| Middle, outer loop motor: Used for defining 2D or 3D scans. These motors are not used in the sweep mode. | ||||||||||||||||||
| Comment: The comment is stored in the MCA files. | ||||||||||||||||||
| Statistics: This frame is of importance for sweep-mode
measurements only. It is filled after the scan parameters are
supplied and the Test button is pressed.
| ||||||||||||||||||
| Sweep: This checkbutton enables/disables the sweep mode. | ||||||||||||||||||
| Move: Every motor has an entry field to specify a new position. Pressing this button starts the move. | ||||||||||||||||||
| Start: Starts the measurement. | ||||||||||||||||||
| Stop: Interrupts the measurement. | ||||||||||||||||||
| Test: Fills the 'Statistics' frame. | ||||||||||||||||||
| Exit: Destroys the widget.
|
The problem for setting up a sweep is to determine the IOT. This can be done with the ConfigureXIA widget from the Options menu. The IOT can be measured, as a first guess, and then it is monitored during a test sweep, then set by the user. If IOT is too low, dp is constantly inceasing and the motion terminates too early. If IOT is too high, there is a feedback for every point and the motion terminates too late. A typical value is 0.02s.