Next: Virtual Motors Up: The Move Widget Previous: The Motor Properties Widget Contents Index
The explanations for how to use this widget are given in our hardware manual.
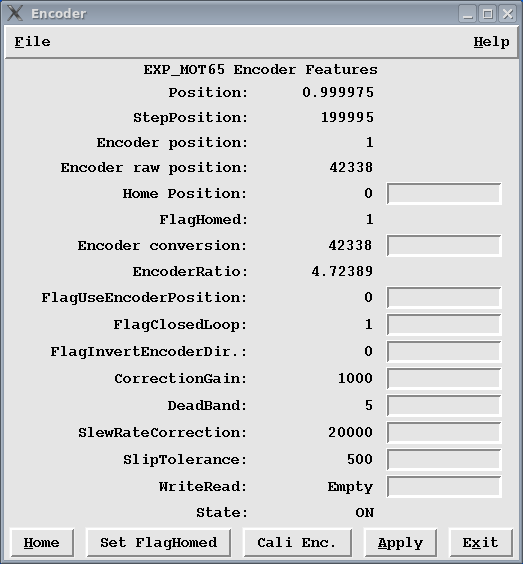
| Encoder position: calculated using the raw position, the home position and the encoder conversion factor. |
| Encoder raw position: result of the RE command. |
| Home position: the home position (reference mark), in units. The motor is calibrated to this position after a homing procedure. |
| Encoder conversion: used to calculate the encoder position. This factor is also necessary for homing procedures and closed loop operations. |
| Encoder ratio: always 1 during open loop operations. For closed loop it is set to the ration Conversion/EncoderConversion. |
| FlagUseEncoderPosition: if set to 1, the server returns the encoder position when the position attribute is read. |
| ClosedLoop: if set to 1, the motor is in closed loop mode after the next move. |
| FlagInvertEncoderDir.: if set to 1, the encoder counts are inverted. Used, if steps and encoder counts are in opposite direction, |
| CorrectionGain: [1,32000], 1000 seems to be a good choice to get started. |
| DeadBand: in steps. |
| SlewRateCorrection: the maximum slew rate used in corrections. |
| SlipTolerance: a slip is signaled, if the encoder counts deviate more than this tolerance from the setpoint. |
| WriteRead: debugging tool. Useful commands: RP request position, RE request encoder, ED? request invert encoder direction. |
| Home: starts the homing procedure. Software limits are ignored when homing is active. Be sure to know what you are doing, if you press this button. |
| Set FlagHomed: useful after a server restart, if the motor was homed and VME stayed powered. |
| Cali Enc.: sets the encoder register using the unit position, the home position
and the encoder conversion factor.
Warning: The motor position must be well-defined (backlash-correct). This is always true after normally completed moves, if the backlash correction is sufficiently large. But this is not necessarily true, if the last movement was interrupted. Things can be settled be executing a move.
|
New parameter values are in effect after the user pressed Apply.