Next: OMSMAXV with Encoder, NON-Tango Up: Hardware Previous: Check-motor-registers, cmr Contents Index
VME motor controller: 8 motors per module. The module type OMSMAXV selects the stepping motor mode.
VME: A32D16/A32D8, 4k at 0x01000000, 0x02000000, ....
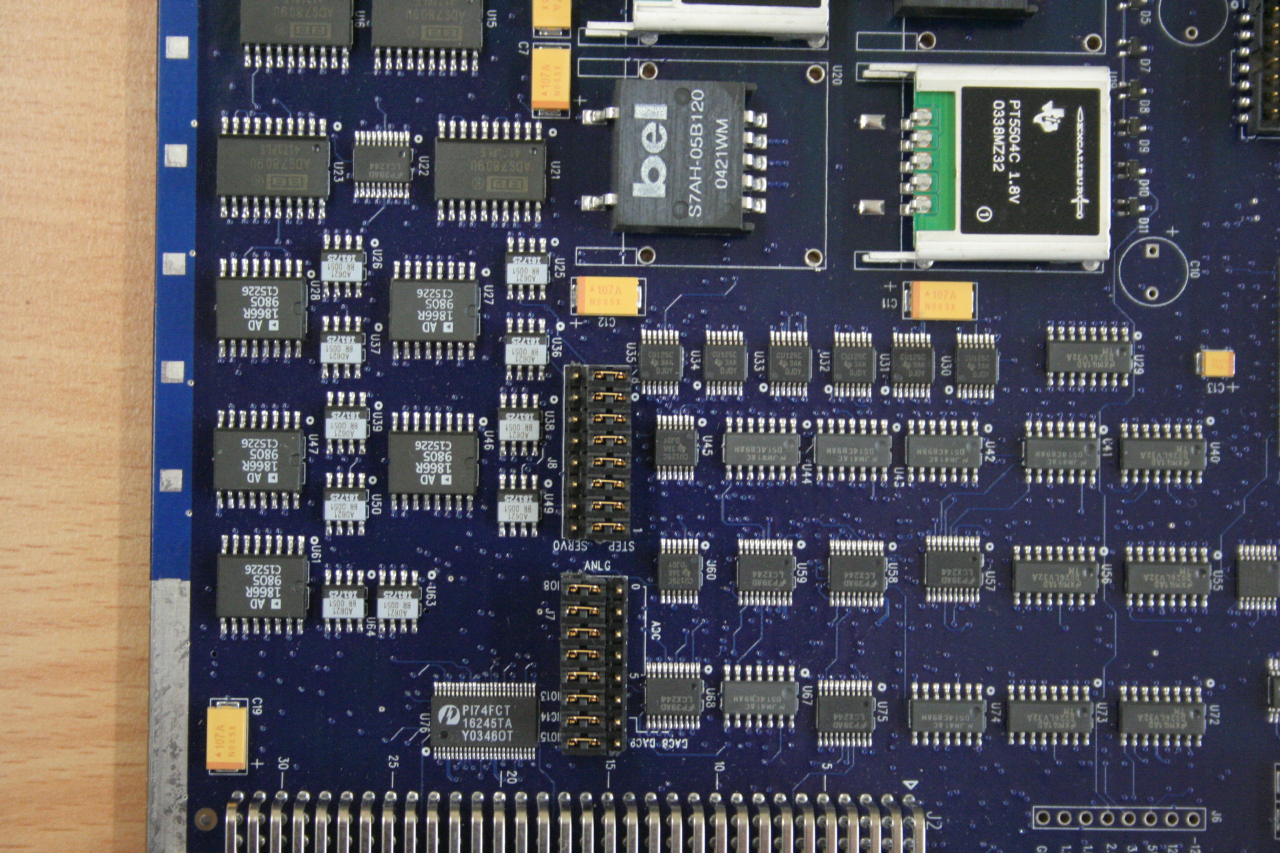
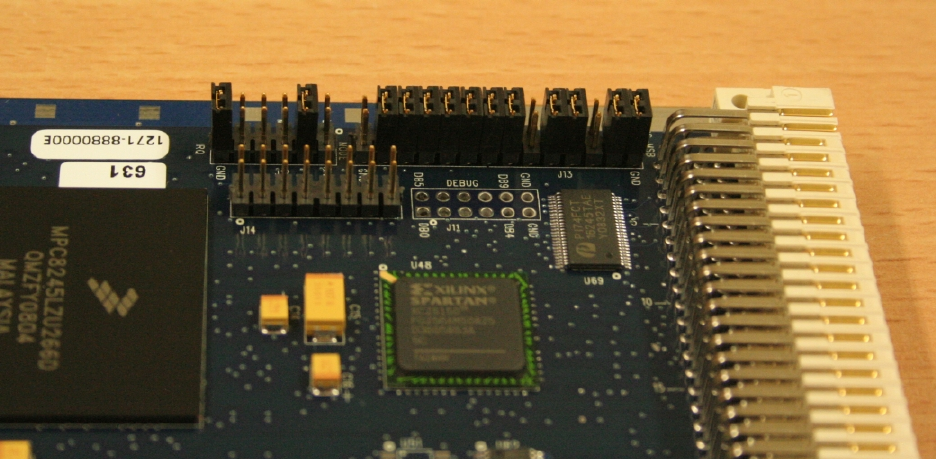
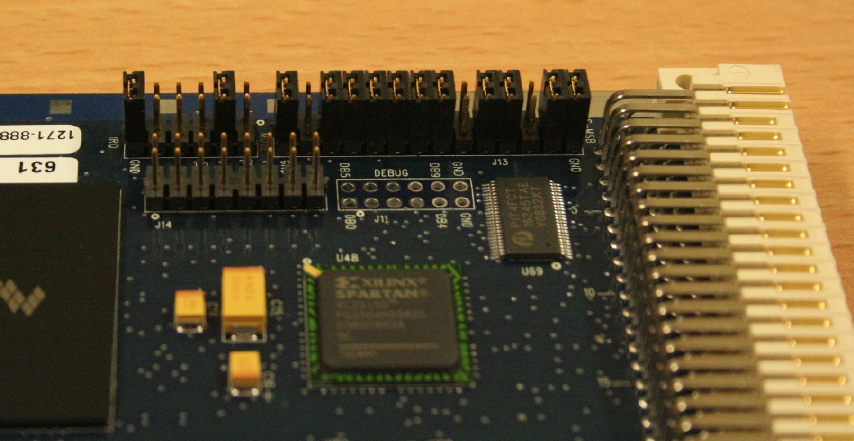
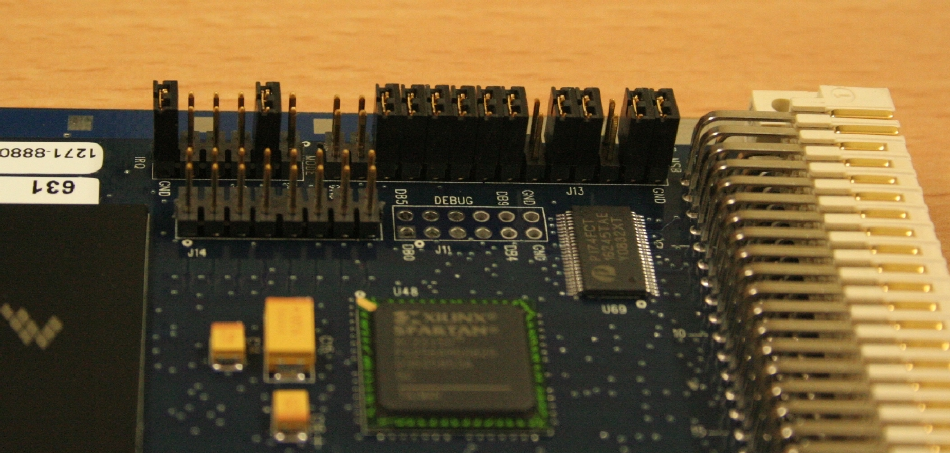
Jumpers (VME connectors point right): J12 100010 ('1' means jumper set), J13 01111111011011 (for base address 0x01000000), J14 always 00000000, J8 all jumpers up, selecting stepper mode, J7 all jumpers low, selection digital I/O.
J12: The 3 leftmost jumpers select A32, A24 aund A16 mode. The A32 jumper is left. The other 3 jumpers select the IRQ which is not used.
J13: The 8 leftmost jumpers specify the base address. The least significant bit is left. An open jumper selects 1. The other 6 jumpers encode the address modifier.
The maximum slew rate is 4000000 steps per second, the maximum
acceleration is 8000000 steps per second . The step position
ranges from
. The step position
ranges from  .
.
Assignment of the limit switches: the cw limit is hit with increasing steps.
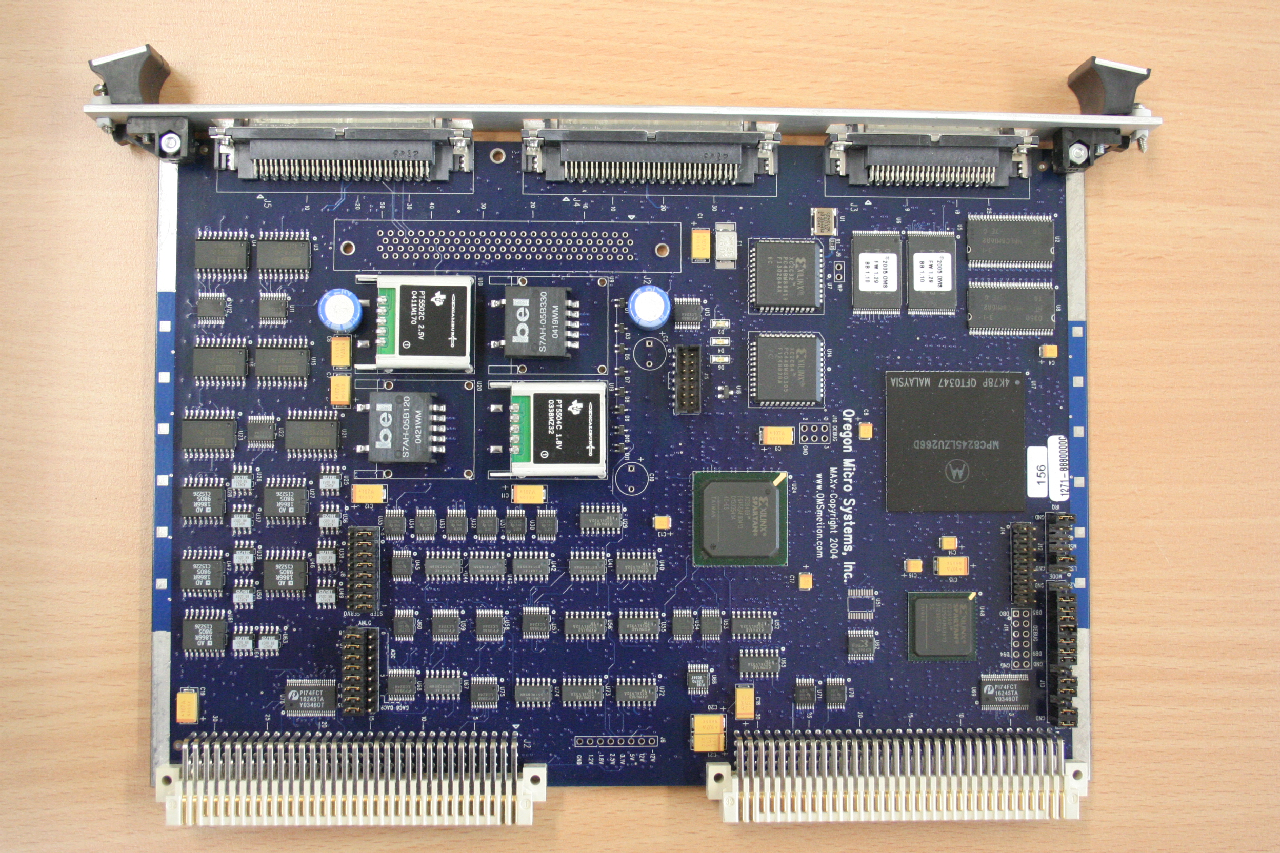
Figure 36.1 shows an OMS MAXV board configured for MOT1 - MOT8 (base 0x1000000). The following figures show some details: 36.2 show the default settings of the J7 and J8 jumpers, 36.3, 36.4, 36.5 show the base address selection for (MOT1-MOT8), (MOT9-MOT16), (MOT17-MOT24).
Stepping motors are introduced to Online by:
define/dev=stepper/mod=omsmaxv/base=0x01000000/vec=0x0/chan=0 mot1 define/dev=stepper/mod=omsmaxv/base=0x01000000/vec=0x0/chan=1 mot2 define/dev=stepper/mod=omsmaxv/base=0x01000000/vec=0x0/chan=2 mot3 define/dev=stepper/mod=omsmaxv/base=0x01000000/vec=0x0/chan=3 mot4 define/dev=stepper/mod=omsmaxv/base=0x01000000/vec=0x0/chan=4 mot5 define/dev=stepper/mod=omsmaxv/base=0x01000000/vec=0x0/chan=5 mot6 define/dev=stepper/mod=omsmaxv/base=0x01000000/vec=0x0/chan=6 mot7 define/dev=stepper/mod=omsmaxv/base=0x01000000/vec=0x0/chan=7 mot8 define/dev=stepper/mod=omsmaxv/base=0x02000000/vec=0x0/chan=0 mot9 ...
If Tango servers are used, we need entries in /online_dir/online.xml, e.g.:
<?xml version="1.0"?> <hw> <!-- comment --> <device> <name>exp_mot01</name> <type>stepping_motor</type> <module>oms58</module> <device>p09/motor/exp.01</device> <control>tango</control> <hostname>haso107tk:10000</hostname> </device> </hw>