Next: online.xml, from P03 Up: Hardware Previous: FMB-Oxford DCM, PMAC, Tango Contents Index
The GalilDMCMotor server has 3 classes:
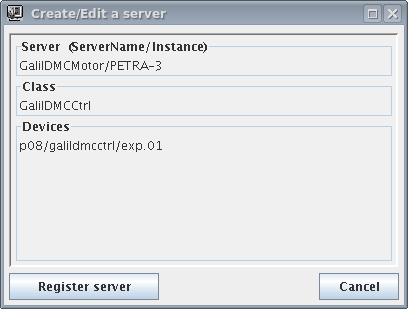
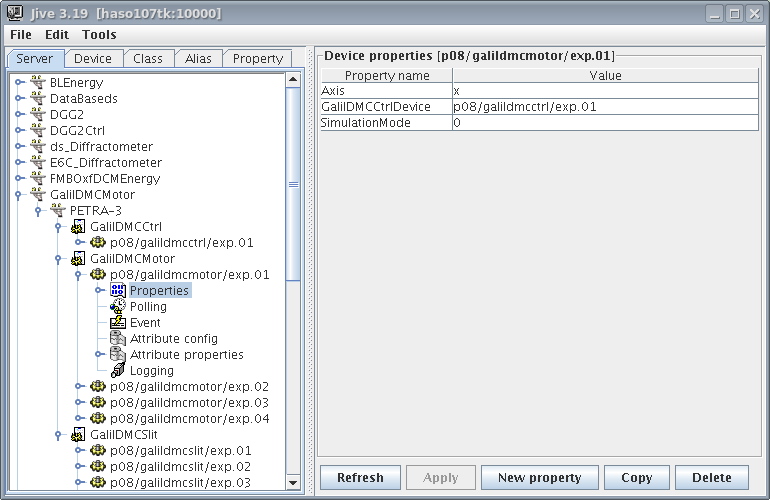
| GalilDMCCtrl Exports the TCP/IP socket connection of the device. |
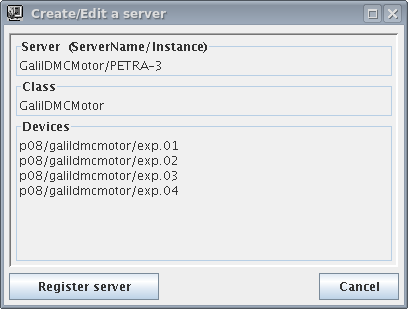
| GalilDMCMotor Exports the axes: x, y, z, w. These devices have the attributes SlewRate and Acceleration. The section 11.1 shows how they are introduced to Online where they can be changed. |
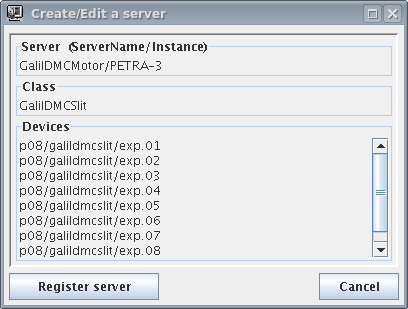
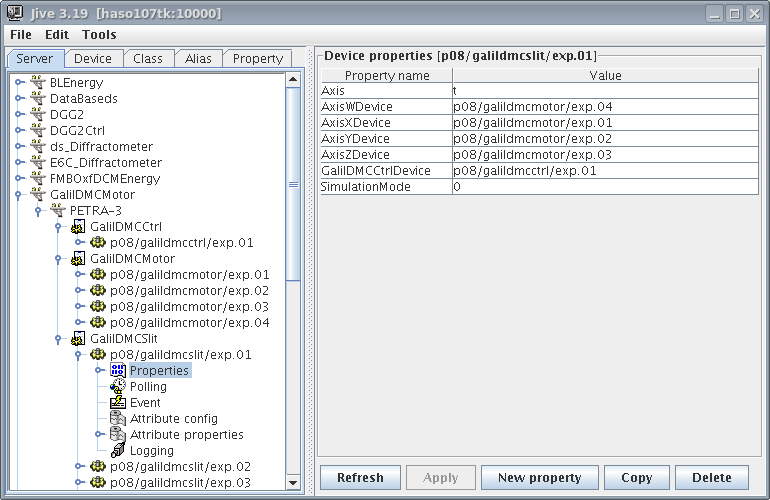
| GalilDMCSlit Exports the slit movables: t, b, l, r, cx, cy, dx, dy. They are mapped to the raw axes in the following way: (x, y, z, w) = ( t, b, l, r), ( cx, cy, dx, dy) = ( (l+r)/2, (t+b)/2, (l-r), (t-b)) |
The GalilDMCMotor class has to be introduced first.
Next the GalilDMCCtrl and GalilDMCSlit classes has to be 'added'.
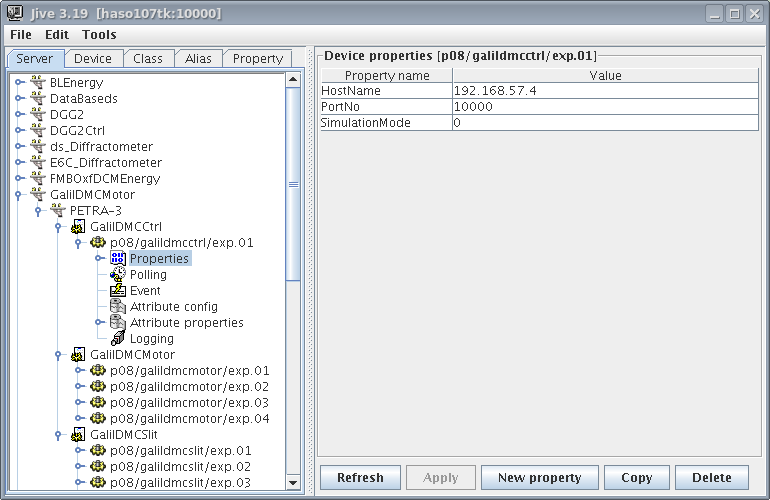
Below you find the properties.
There is a script n the directory /home/experiment/sbin for creating the corresponding devices:
createGalilSlit.py -b beamline -g galilhost -i instance -l location [-f ]
For example:
createGalilSlit.py -b p03 -g haspgslit05 -i PETRA-3 -l slit4
the 'location' is the last part of the Tango device name. The command
createGalilSlit.py -h
gives some help.